
I direct the Laboratory for Intelligent Perceptual Systems (LIPS). Research in LIPS concentrates on the investigation, design, and algorithmic realization of models that endow computing machines and systems with the ability to sense, interpret, and act upon the content of their environment. Available software packages, will be freely available for non-commercial, non-profit, and academic use.
 Dialation of Chisini-Jensen-Shannon Divergence
(Related
Publications)
Dialation of Chisini-Jensen-Shannon Divergence
(Related
Publications)
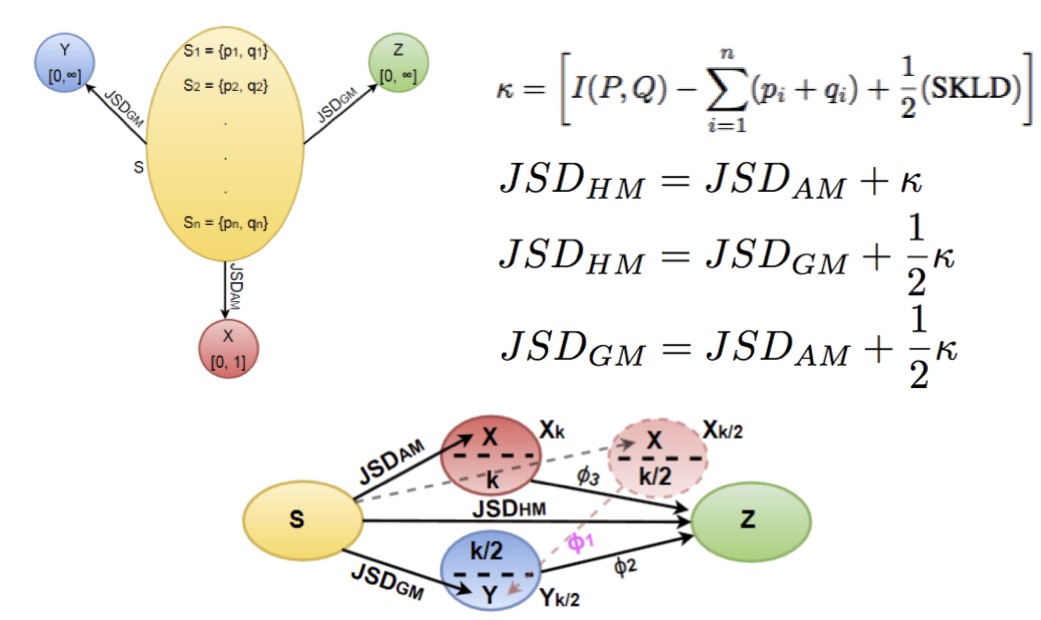
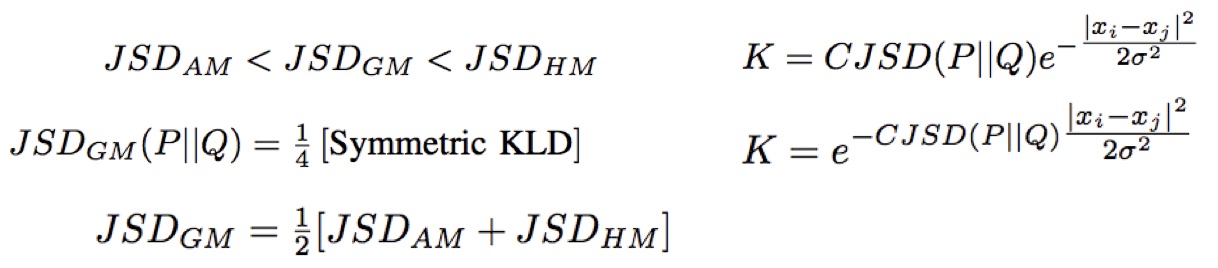
Jensen-Shannon divergence (JSD) does not provide adequate separation when the difference between input distributions is subtle. A recently introduced technique, Chisini Jensen Shannon Divergence (CJSD), increases JSD’s ability to discriminate between probability distributions by reformulating with operators from Chisini mean. As a consequence, CJSDs also carry additional properties concerning robustness. The utility of this approach was validated in the form of two SVM kernels that give superior classification performance. Our work explores why the performance improvement to JSDs is afforded by this reformulation. We characterize the nature of this improvement based on the idea of relative dilation, that is how Chisini mean transforms JSD’s range and prove a number of propositions that establish the degree of this separation. Finally, we provide empirical validation on a synthetic dataset that confirms our theoretical results pertaining to relative dilation.
 A Family of Chisini Mean Based Jensen-Shannon Divergence Kernels
(Related
Publications)
A Family of Chisini Mean Based Jensen-Shannon Divergence Kernels
(Related
Publications)
Jensen-Shannon divergence is an effective method for measuring the distance between two probability distributions. When the difference between these two distributions is subtle, Jensen-Shannon divergence does not provide adequate separation to draw distinctions from subtly different distributions. We extend Jensen-Shannon divergence by reformulating it using alternate operators that provide different properties concerning robustness. Furthermore, we prove a number of important properties for this extension: the lower limits of its range, and its relationship to Shannon Entropy and Kullback-Leibler divergence. Finally, we propose a family of new kernels, based on Chisini mean Jensen-Shannon divergence, and demonstrate its utility in providing better SVM classification accuracy over RBF kernels for amino acid spectra. Because spectral methods capture phenomenon at subatomic levels, differences between complex compounds can often be subtle. While the impetus behind this work began with spectral data, the methods are generally applicable to domains where subtle differences are important.
 Investigating Manifold Neigbhorhood size for Nonlinear Analysis of LIBS Amino Acid Spectra
Investigating Manifold Neigbhorhood size for Nonlinear Analysis of LIBS Amino Acid Spectra
Analysis of LIBS Amino Acid Spectra and the Impact of Neighborhood Size on the Efficacy of Nonlinear Analysis
(Related
Publications)
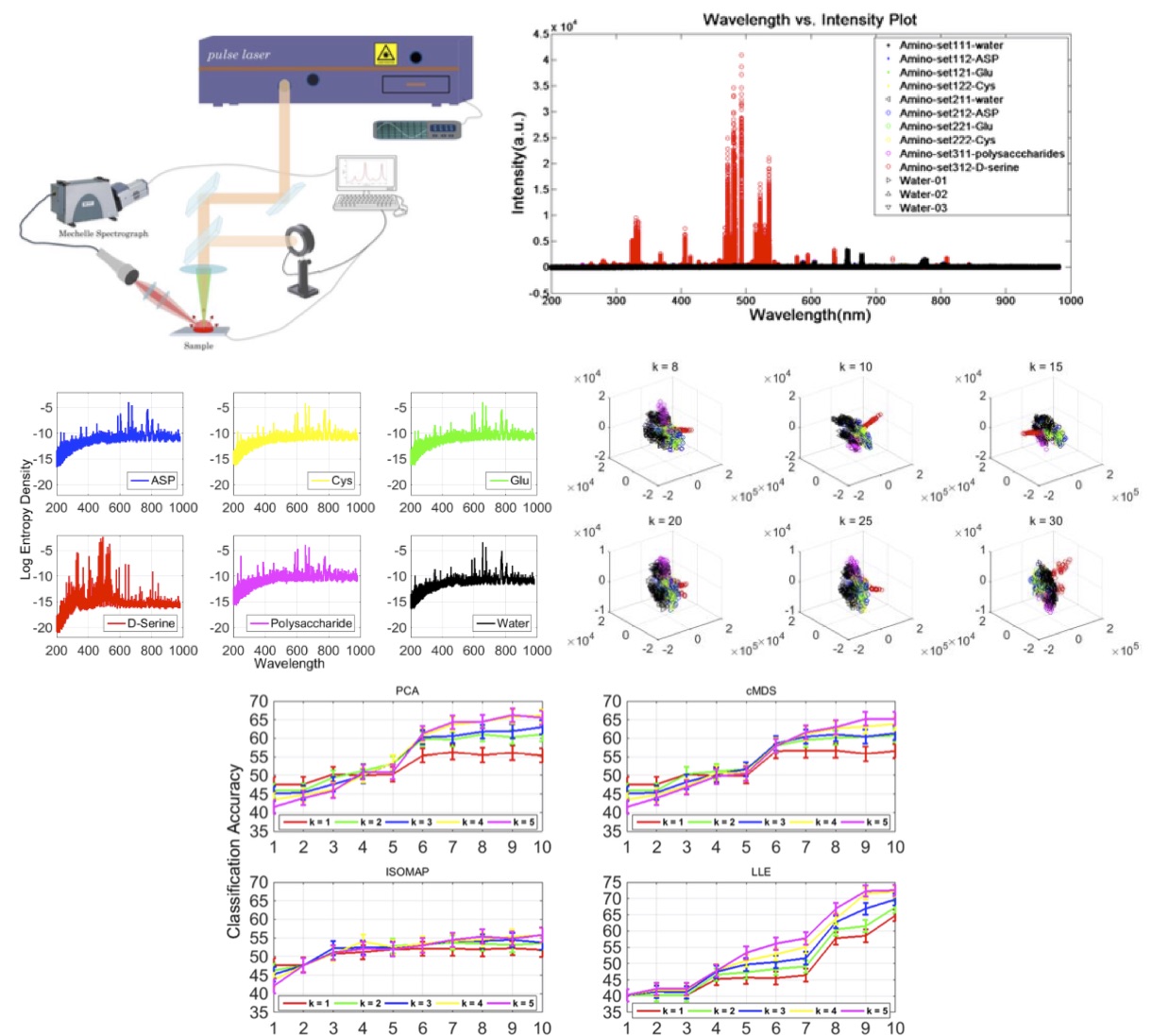
Classification and identification of amino acids in aqueous solutions is important in the study of biomacromolecules. Laser Induced Breakdown Spectroscopy (LIBS) uses high energy laser-pulses for ablation of chemical compounds whose radiated spectra are captured and recorded to reveal molecular structure. Spectral peaks and noise from LIBS are impacted by experimental protocols. Current methods for LIBS spectral analysis achieves promising results using PCA, a linear method. It is well-known that the underlying physical processes behind LIBS are highly nonlinear. Our work set out to understand the impact of LIBS spectra on suitable neighborhood size over which to consider pattern phenomena, if nonlinear methods capture pattern phenomena with increased efficacy, and how they improve classification and identification of compounds. We analyzed four amino acids, polysaccharide, and a control group, water. We developed an information theoretic method for measurement of LIBS energy spectra, implemented manifold methods for nonlinear dimensionality reduction, and found while clustering results were not statistically significantly different, nonlinear methods lead to increased classification accuracy. Moreover, our approach uncovered the contribution of micro-wells (experimental protocol) in LIBS spectra. To the best of our knowledge, ours is the first application of Manifold methods to LIBS amino-acid analysis in the research literature.
 A Prototype
Distributed Framework for Identification and Alerting for Medical Events in Home Care
(Related
Publications)
A Prototype
Distributed Framework for Identification and Alerting for Medical Events in Home Care
(Related
Publications)
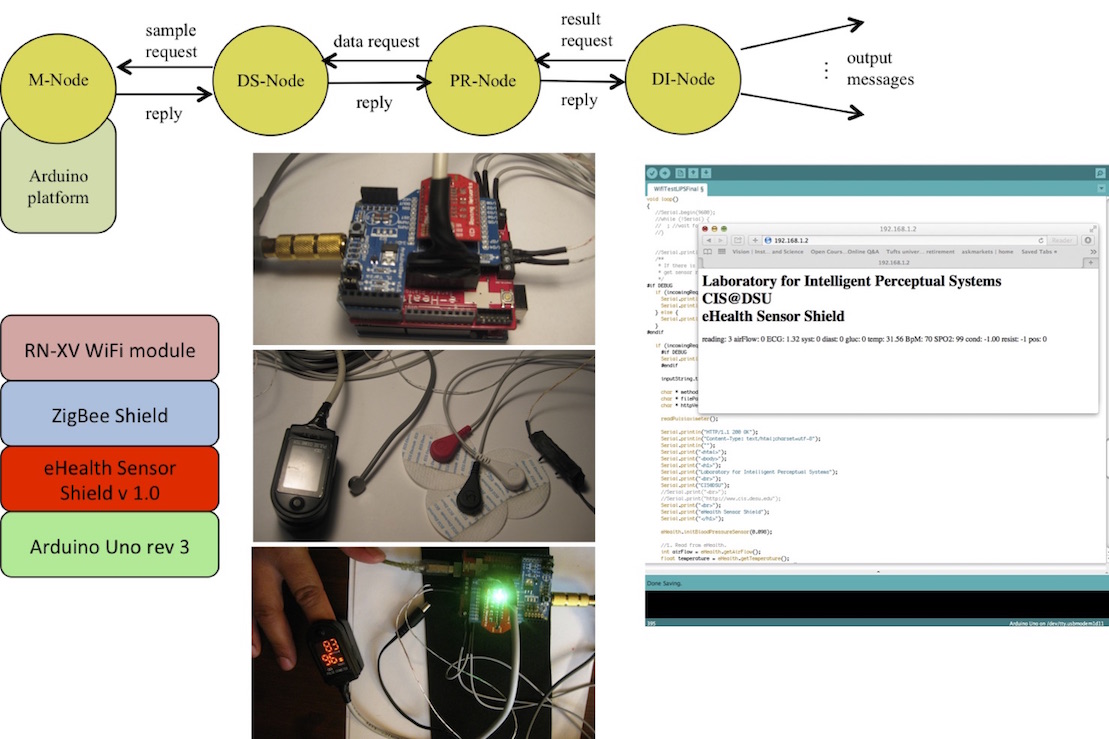
Aging in place, or the ability to live in one's own home or with family throughout the senior years, is a viable model for reducing strain on long term care facilities in addition to improving quality of life for the chronically ill. In home care is also a viable solution for easing the impending burden on the healthcare system imposed by an aging population. The key to improved management and outcomes for care of chronic illness such as diabetes, heart disease, stroke, and Alzheimer’s disease includes regular visits with home care and allied health professionals for the measurement and assessment of vital statistics. Too often, in practice, the day-to-day management of care rests on the patient and his or her family. Industry trends have begun to see wireless devices such as inertial measurement units (IMUs), heart monitors, blood O2 sensors, and glucose monitors provide valuable continuous monitoring data that can be used as the basis of indicators for unfolding medical issues. Armed with such tools, a patient’s healthcare team (physicians, allied health, and family) would be better able to coordinate early intervention before an issue degrades into a catastrophic event. The proliferation of sensing devices and low cost embedded systems has spurred the growth in sensory technologies and perceptual robotic systems. Today, the emergence of perceptual applications has impacted consumer applications such as face detection in digital cameras, location monitoring in smartphones, and player motion detection in video game consoles. Machine perception can provide the eyes and ears that monitor daily patient activities and vital measurements, while robotic assistants serve as the remote helping hands capable of assisting in the performance of daily activities and certain interventions. What began in 2005 as a tool for students to experiment with embedded systems, the Arduino platform has grown into a worldwide community of relatively inexpensive controller boards, sensors, and accessories that has fueled embedded systems development in do-it-yourself, hobbyist, and research communities. Because hardware schematic software libraries are freely available through open source licensing, similar to the community of Linux and Linux based applications, it is inevitable that Arduino based systems and products will appear in the commercial marketplace. Experiments describe an effort to build a prototype system based on the Arduino platform purposed with building tools for medical monitoring within homecare environments.
 A Framework for Perceptual Processing in Autonomous Wheelchairs
(Related
Publications)
A Framework for Perceptual Processing in Autonomous Wheelchairs
(Related
Publications)
Ongoing research addresses mobility for individuals with physical and perceptuo-cognitive impairments. We have outfitted a powered wheelchair with sensors and are biulding algorithms for navigation, obstical avoidance, and localization. As the wheelchair interacts with its environment, it employs its sensor measurements to update it representation of the current environmental state. With this, the robot platform is able to select appropriate actioons to achieve a goal. In designing such systems, key steps are often repeated in the development of processes for extraction of percepts from sensors. This work makes an early exploration of an architecture for reuse of common components developed for such processes.
 Using Robots to
Improve Socialization Skills of Autistic Children
(Related
Publications)
Using Robots to
Improve Socialization Skills of Autistic Children
(Related
Publications)
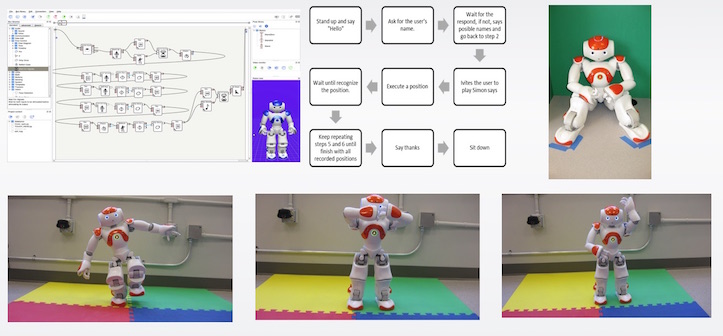
Research has found that autistic children respond to and interact better with animals and machines than human therapists. Since autistic children are interested in electronic devices, the interaction between the child and robot is feasible. The goal of this project was to develop an algorithm, using Python, that guides a humanoid robot through an interaction in the form of a "Simon Says" game. These short (15-20 minute) and repetitive routines engage the motor and socialization skills. As a theraputic tool humanoid robotics show promise in their ability to execute repetitive tasks with precision. This, we feel, allows therapists to track the progression of the child's social skills over time.
 AIR: A Framework for Adaptive Immune Response for Cyber Defense
(Related
Publications)
AIR: A Framework for Adaptive Immune Response for Cyber Defense
(Related
Publications)
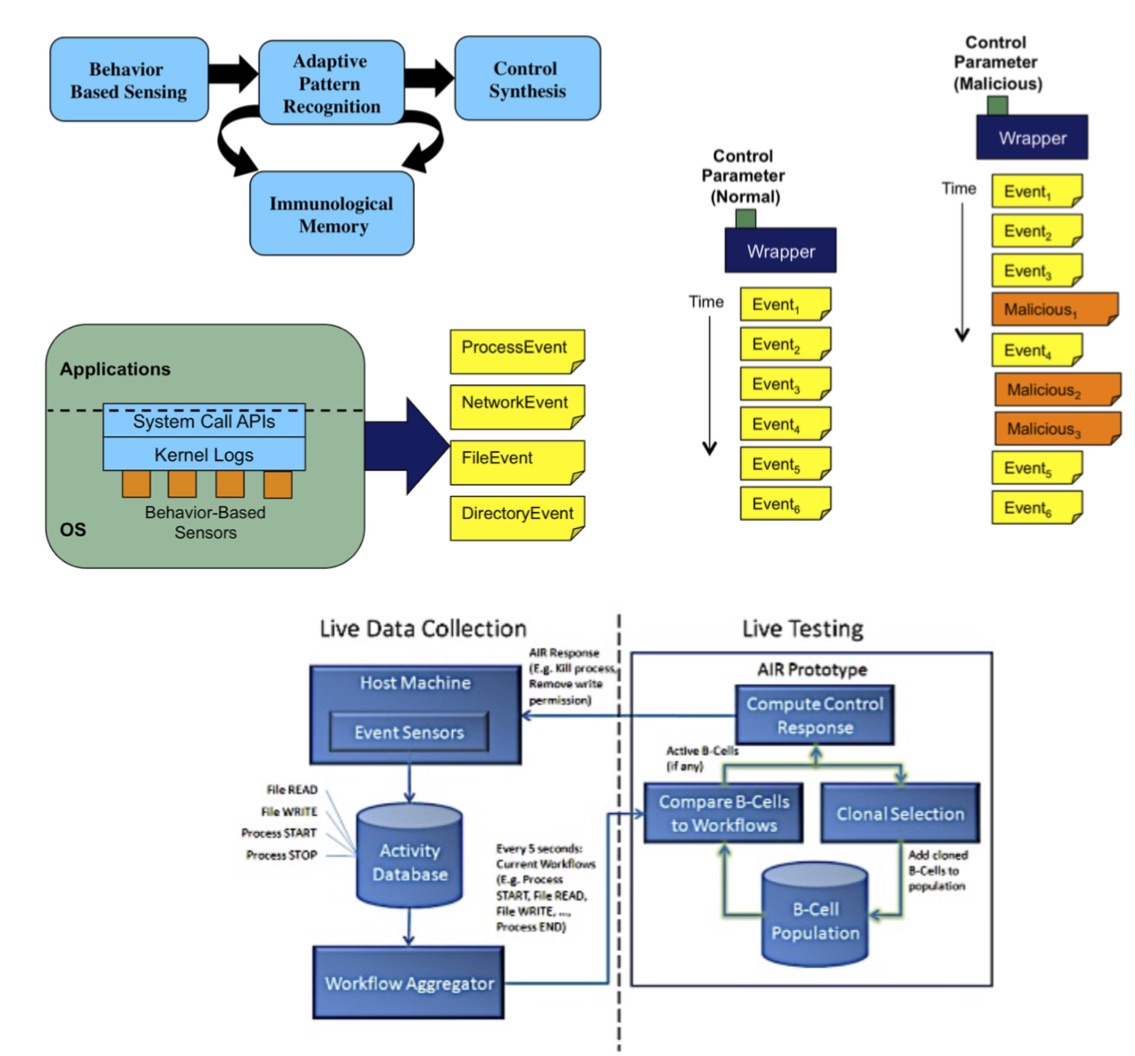
Cyber security warrants adaptive systems in a world where attack vectors are continually evolving. Current AIS approaches to cyber security pair pattern recognition elements with encoding for mitigating actions. With this approach, when an AIS pattern recognition element detects attack behavior, the corresponding action is invoked. We present a framework and proof of concept implementation for the composition of Adaptive Responses in Artificial Immune Systems for the cyber domain. Our approach combines behavior-based sensing, adaptive pattern recognition, active maintenance of immunological memory, and robot control synthesis to achieve adaptation in the response action for evolving pattern detection. We believe that the integration of techniques from robot control synthesis along with adaptive AIS pattern recognition methods, including active maintenance of immunological memory, can be effective for attacks characterized by evolving attack vectors. We test our system against a class of zero day attacks involving vulnerabilities in a popular PDF reader in a data-exfiltration scenario. Results demonstrate its utility in an environment with significant background noise and concurrent system activities. This motivates future work on expanded attack vectors and scenarios.
 Ensemble Methods
(Related
Publications)
Ensemble Methods
(Related
Publications)
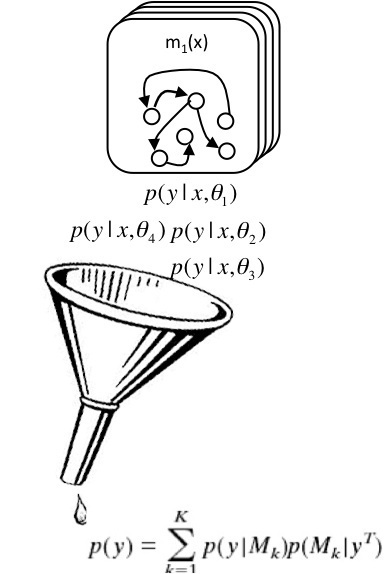
Ensemble methods in machine learning concerns the construction of high
fidelity models for pattern learning by combining a number of simpler
component models. If the error processes of the component models
are diverse, one can build an aggregate model whose performance exceeds
what is capable with a single model. Diversity in ensembles can be
achieved by varying the factors that affect the error distribution and
other performance characteristics of the component models. These
factors include the feature representation of the input data, the training
input selection and component model parameterizations.
This work concerns work in understanding how error diversity affects the
performance boost due to voting and aggregation methods for combining
component models in ensemble methods. With a better understanding of
why ensembles work, we can more deliberately construct ensembles that
realize significant performance increases.
Sparse Nonparametric Density Estimation in High Dimensions (Related Publications)
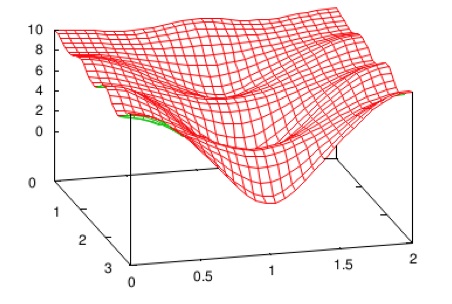 Nonparametric density estimation approaches, such as kernel estimators, that employ a mixture of local models are effective on data-sets of
low dimension. A problem arises as dimensionality increases because of added computational cost necessary in tuning kernel bandwidths
for anisotropic models. Mixture models with a fixed number of model components can be effective, but their fidelity is valid only
up to the underlying model assumptions. Nonparametric mixture models can certainly adapt the number of components to meet complexity
of the data, but can suffer from slow rates of convergence as with kernel based approaches. Recently a sparse nonparametric method based
on Regularization of Derivative Expectation Operator or Rodeo (Liu, Lafferty, and Wasserman 2007) was introduced that uses a parametric and
nonparametric component in an interesting way. During training, Rodeo incrementally decreases bandwidth for kernels along directions
where the estimators gradient with respect to bandwidth is largest. Their approach avoids the curse of dimensionality by maintaining
sparsity. Rodeo issues a series of hypothesis tests to tune the non-parametric model components. I am interested in active test-based
approaches to model fitting, particularly in data-environments of high dimension. In addition, I am interested in extensions of such
methods to streaming data. I was made aware of Rodeo during discussion at a scientific meeting where I presented
the following work [Holness, 2009].
In conducting this work, I encountered issues in estimating the off diagonal terms of a covariance matrix for a
density estimate. Upon further reading, I began investigating plugin-esimators and am greatful for information and
advice from Robert Serfling at UT-Dallas on U-statistics.
This has sparked my interest in efficient algorithms for density estimation, an important tool for machine learning.
Nonparametric density estimation approaches, such as kernel estimators, that employ a mixture of local models are effective on data-sets of
low dimension. A problem arises as dimensionality increases because of added computational cost necessary in tuning kernel bandwidths
for anisotropic models. Mixture models with a fixed number of model components can be effective, but their fidelity is valid only
up to the underlying model assumptions. Nonparametric mixture models can certainly adapt the number of components to meet complexity
of the data, but can suffer from slow rates of convergence as with kernel based approaches. Recently a sparse nonparametric method based
on Regularization of Derivative Expectation Operator or Rodeo (Liu, Lafferty, and Wasserman 2007) was introduced that uses a parametric and
nonparametric component in an interesting way. During training, Rodeo incrementally decreases bandwidth for kernels along directions
where the estimators gradient with respect to bandwidth is largest. Their approach avoids the curse of dimensionality by maintaining
sparsity. Rodeo issues a series of hypothesis tests to tune the non-parametric model components. I am interested in active test-based
approaches to model fitting, particularly in data-environments of high dimension. In addition, I am interested in extensions of such
methods to streaming data. I was made aware of Rodeo during discussion at a scientific meeting where I presented
the following work [Holness, 2009].
In conducting this work, I encountered issues in estimating the off diagonal terms of a covariance matrix for a
density estimate. Upon further reading, I began investigating plugin-esimators and am greatful for information and
advice from Robert Serfling at UT-Dallas on U-statistics.
This has sparked my interest in efficient algorithms for density estimation, an important tool for machine learning.
Interactive Artificial Intelligence (Related Publications)
 Begun while working in industry, this research collaboration strived to balance autonomy between
explicit user control and automated reasoning. In many information monitoring types of applications,
a human analyst must sift through large volumes of data in order to hilight that subset that
warrants increased scrutiny. Automated methods can be valuable by assisting in the relevance
scoring of data. In mission critical environments such as medical monitoring stations and
military operations centers, the culture is for the human analyst to always maintain control
During the analysis process, an analyst may prefer to micro-manage the machine assistant
and other times the analyst makes heavier use of automated scoring. In our work we balance
graded-autonomy by treating data as a series of control points fully adjustable by the
analyst as a means of giving feedback to an incrementally refined scoring model. The model
propagates corrections using the underlying maninfold uncovered from the data.
Begun while working in industry, this research collaboration strived to balance autonomy between
explicit user control and automated reasoning. In many information monitoring types of applications,
a human analyst must sift through large volumes of data in order to hilight that subset that
warrants increased scrutiny. Automated methods can be valuable by assisting in the relevance
scoring of data. In mission critical environments such as medical monitoring stations and
military operations centers, the culture is for the human analyst to always maintain control
During the analysis process, an analyst may prefer to micro-manage the machine assistant
and other times the analyst makes heavier use of automated scoring. In our work we balance
graded-autonomy by treating data as a series of control points fully adjustable by the
analyst as a means of giving feedback to an incrementally refined scoring model. The model
propagates corrections using the underlying maninfold uncovered from the data.
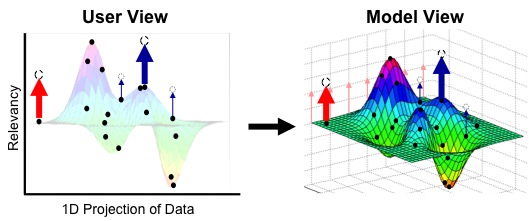
We explored interactive learning of a regression function in collaboration with the user [Eaton, Holness, & McFarlane in AAAI 2010]. The user views a scatterplot of data scored by the function and can graphically correct the score of individual instances. The system then generalizes each correction to nearby instances, as determined by a manifold underlying the data, and updates the learned function and associated scatterplot. Interactive learning based on this manifold generalizes each user adjustment to other related data in an intuitive manner that monotonically improves performance with any correction. This property of continuous improvement ensures that the system will be accepted by users, in contrast to several other learning approaches which initially overfit each correction, potentially causing users to decrease their trust in the AI components. Thiswork was applied to an information management system used to monitor threats -- an application in which users require the ability to rapidly adjust the scoring function in response to changing requirements.
The key contribution of this work was that our approach monotonically improves with each adjustment irrespective of the selection order of corrected data points. This is an important feature, because the practical constraints within mission critical deployment environment does not allow for autonomy that worsens analyst performance. Current work includes further extensions of this research.
 A Service Paradigm for Reconfigurable Agents
A Service Paradigm for Reconfigurable Agents
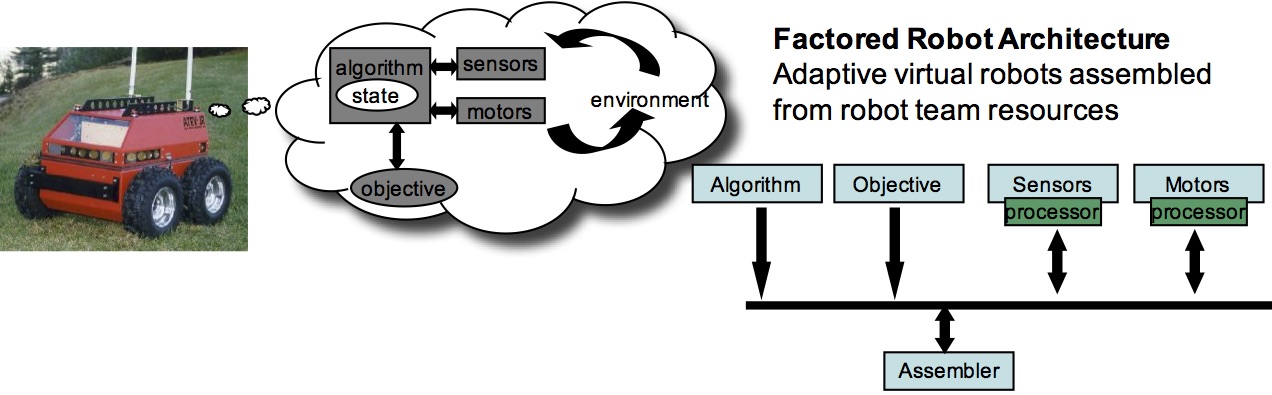
Factored Robot Architecture
(Related
Publications)
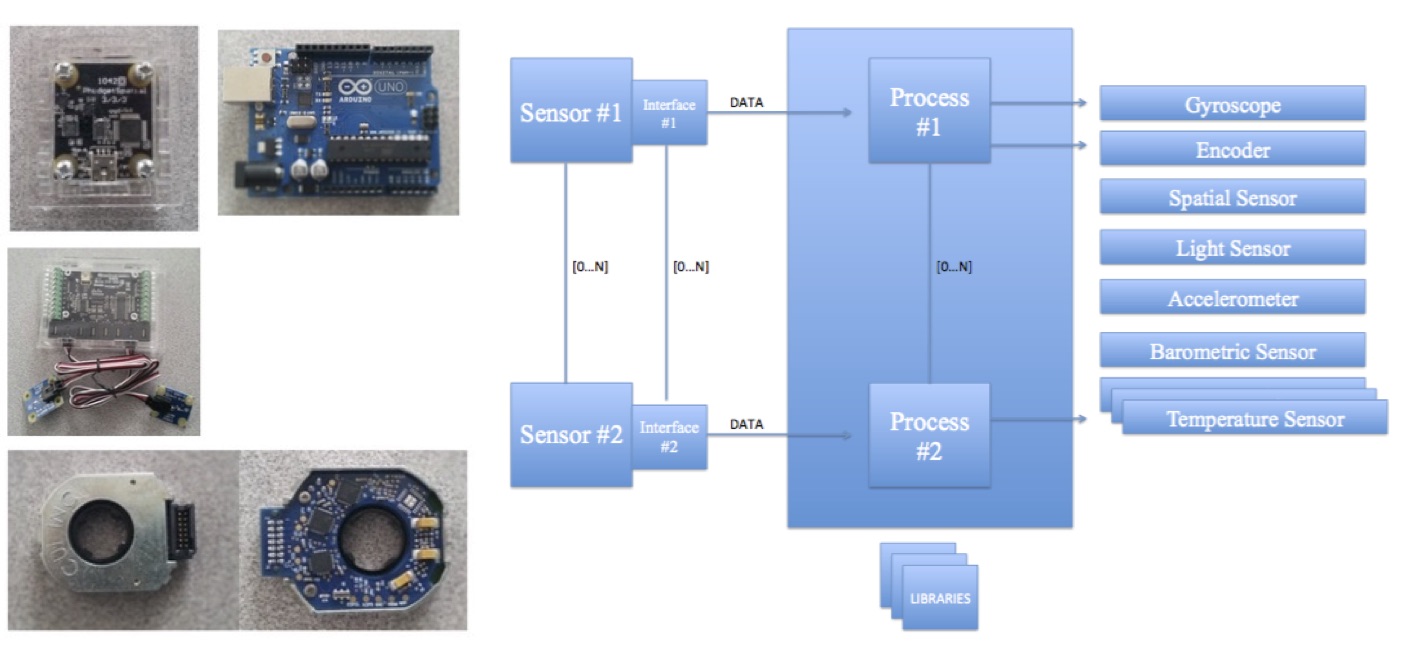
Applications of multiple processors embedded in the systems involved with entertainment, informatics, climate control, communications, transportation, and food preparation are already commonplace. A network of these embedded processors presents application development challenges since the state space grows exponentially as new devices attach to the network. The programming model for such systems will need to change if reliable systems are to be realized. By observing information about sensorimotor activity, such systems can gather information useful to programming the network. Through such interaction, a network can build hierarchies of shareable computational structures for representing various activities. By factoring perceptual systems and making them accessible services on the network, a robot becomes a virtual assemblage that recruits available resources at run-time. Such service compositions provide a richer suite of perceptual and robotic services because it is able to construct a virtual robot consisting of any combination of the available sensory-motor apparatus.